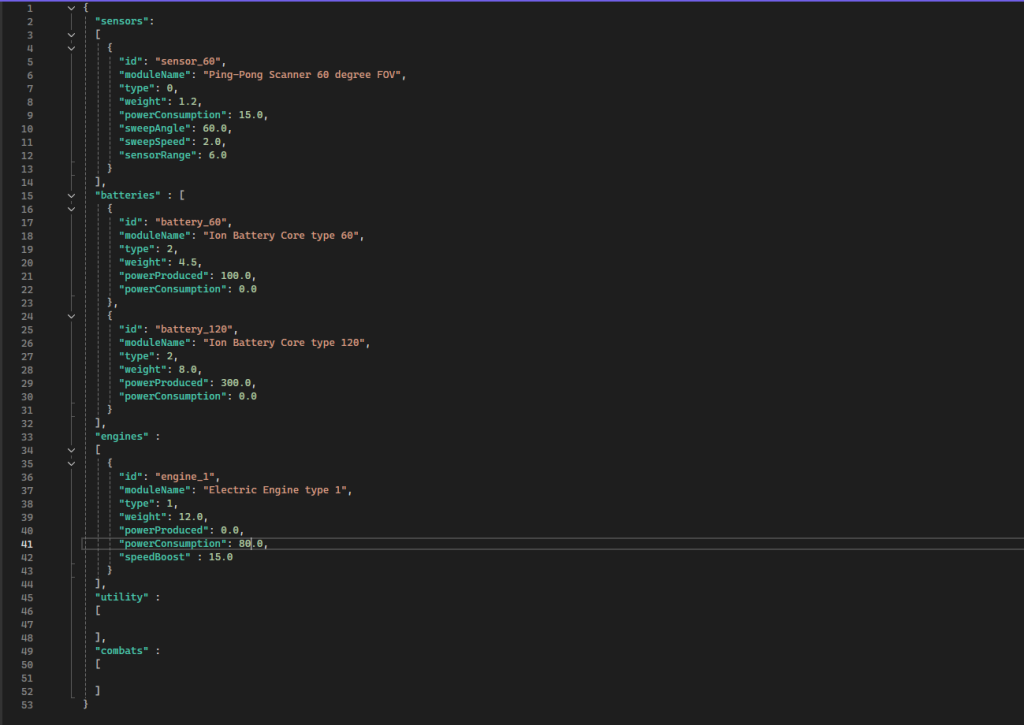
This time, I focused on standardizing the data architecture for my drone simulator project. Using a Notebook-First approach, I moved the hardware configuration logic from a C# script to an external JSON file.
Technical Highlights :
- Modularity : Each component (Sensor, Engine, Battery) now has its own physical profile in JSON. This allows me to balance the game without touching the code.
- Perception vs. Action : I implemented a local coordinate filtration system. As a result, the sensors can scan a wide area, but the navigation system will only respond if an obstacle completely blocks the Rover’s clearance zone.
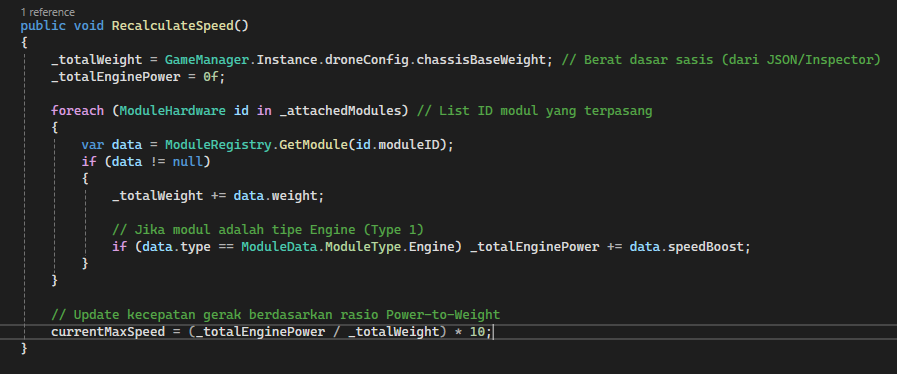
- Resource Constraint : I added weight penalty and power management logic. This creates a strategic dilemma for players: Speed vs. Endurance vs. Sensory Completeness.
The next step is to bring this system to the Auto-Battler genre, where the user’s assembled intelligence will be tested in an autonomous simulation arena. There are still several other components I need to develop to achieve this goal, such as the “Shared Target” system, drone classes based on their function and characteristics (e.g., interceptors with melee weapons, sentinels with ranged weapons, and scouts that scan the area and find targets, etc.)
I will also complete the UI components to make it easier to detect the balance and proportion of the modules installed on the drone.